
1. Introduction
The signing of the Artemis Accords in 2020 signalled a strong commitment to push the boundaries of space exploration and innovation (NASA, 2020). This program includes plans for a Lunar Gateway space station and permanent lunar base intended as a foundation for future missions to Mars. Positioning, navigation and timing (PNT) infrastructure is included in these proposals to enable safe navigation both on the lunar surface and in cis-lunar space (Johnson et al., 2021). The challenge and dilemma is how to provide safe navigation in these regions while this infrastructure is under development, as well as providing possible alternatives should the Lunar Gateway not proceed (Whittington, 2022). Many ideas have been considered including expansions and augmentation of earth-orbiting navigation systems as well as surface beacons on the Earth and Moon (Domotor et al., 2023). Despite the potential that these systems offer in providing PNT services, currently the existing global navigation satellite systems (GNSS) are the most developed and reliable technology available capable of supporting cis-lunar space activities including Artemis and any similar lunar missions in the near term. This paper investigates the potential of existing GNSS in supporting cis-lunar navigation and examines some likely future alternatives.
The space industry has been undergoing a massive paradigm shift over recent decades. From an industry once led by government-sponsored programs, which focussed upon national security, it has evolved into one now dominated by the private sector and driven by commercial ventures that prioritise operational efficiency. Underpinning this change has been a thirty-fold decrease in launch costs over the last 40 years, which has seen the cost of launch plummet from over 40,000 $/kg to less than 1,500 $/kg. This decrease is predicted to continue with launch costs dropping even further to an estimated 100 $/kg by 2040 (Daswani et al., 2022). This trend will facilitate new opportunities, which will place greater demands upon the requirements for navigational precision in space, which can be addressed through the widespread adoption of the same GNSS currently used for terrestrial navigation. Spacecraft in low Earth orbit (LEO) have benefited from GNSS since nascent test flights beginning in the 1980s (Ashman et al., 2018). The market for GNSS in LEO has sufficiently matured over the ensuing decades such that dedicated navigation systems designed for LEO are now commercially available (Reid et al., 2022). Indeed, GNSS use in LEO is now commonplace with real-time on-board positional accuracies of 10 cm (Bauer et al., 2006).
The term GNSS is used to describe any satellite constellation, which provides PNT services on a regional or global basis (National Coordination Office for Space-Based Positioning, Navigation, and Timing, 2021). While its use to date has been almost exclusively for terrestrial or near-Earth navigation, GNSS-based space navigation offers many significant benefits for space exploration applications (Ashman et al., 2018) including:
-
A reduction in recovery times from trajectory manoeuvres from 5-10 hrs to minutes.
-
Improvements to operational cadence (e.g. less specialised training, reduced software licence costs, fewer work shifts, reduced tracking, and a more rapid response to anomalies).
-
Greater satellite autonomy which permits formation flying and greatly reduced ground-based tracking and orbit determination. For multi-spacecraft missions involving formation flying, costs savings up to $750,000 per year have been estimated.
-
Improved navigational precision for velocity, position and navigation stability.
-
A reduced need for expensive on-board clocks within the satellite.
Benefits from utilising GNSS include greater autonomy derived from both greater precision in real-time knowledge of orbital position and increased resilience through multiple-GNSS signal diversity which reduces costs through reduced reliance upon support infrastructure and enables the use of lower-cost components (such as clocks) in the construction of the spacecraft (NASA, 2019). These benefits do not come without some disadvantages. Non-standard receivers and radiation hardened equipment must be utilised to protect the receivers over the lifetime of the satellite (Kehr, 2009).
Access to GNSS services has proven valuable in a number of space-borne applications and may be instrumental to opening up new applications (EUSPA, 2021). Space-based applications that can benefit from GNSS PNT services (Parker, 2021) include: improved Earth weather and observation monitoring; space situational awareness; collision avoidance; precision formation flying; improved proximity operations such as on orbit servicing; satellite co-location in crowded orbits such as GEO; and cis-lunar navigation.
2. Use of GNSS for space navigation
GNSS systems are generally based upon a constellation of satellites located in medium Earth orbit (MEO) which are spread across several orbital planes. One of the exceptions to this is Japan’s Quasi-Zenith Satellite System which is intended to augment existing Global Positioning System (GPS) services by overcoming poor reception due to ‘urban canyoning’ through satellite orbits which spend more time lingering over the zenith (Sato et al., 2011). These satellites transmit a one-way radio signal, which can be used to determine position and velocity in three dimensions. All these systems are designed to broadcast a signal to terrestrial and near-Earth users and not into higher orbits or cis-lunar space. The challenge of adapting GNSS for use in space (particularly for orbits higher than MEO) lies primarily in obtaining a signal from a system specifically designed to transmit towards the Earth and not away from it. One approach for using GPS in higher orbits is to use the back lobe of the GPS transmission, which can be viewed from higher orbits (see Figure 1a). The difficulties associated with using this very weak signal has curtailed the development of this option and practical units are not yet available (Kehr, 2009).
_a_typical_gps_antenna_radiation_pattern_comparing_the_beamwidth_of_both_the_main_lobe_.png)
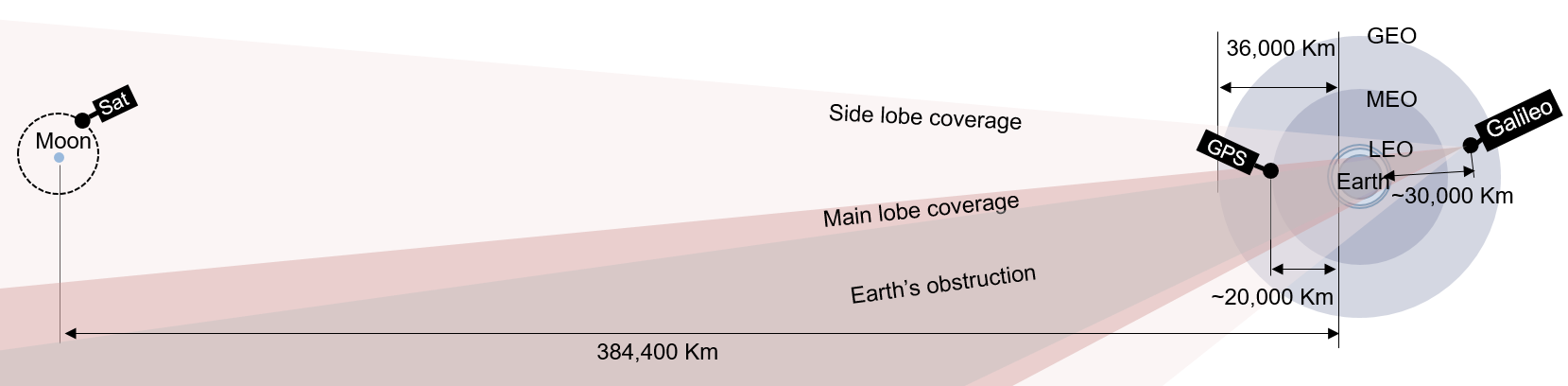
Another approach is to detect the ‘downward’ transmitted signal visible from orbits on the other side of the planet, and not otherwise obscured by the Earth itself (see Figure 1b), possibly including the less powerful side-lobe transmissions which had previously represented wasted signal (Baird & Hatfield, 2019). The beam width of the main lobe is around 27° which is wider than the Earth’s shadowing effect in GEO (i.e. 21.5°) and although the signal strength is attenuated at these greatly increased distances, cross-correlation techniques allow the pseudorandom noise (PRN) spreading codes to be recovered (Kehr, 2009). Use of GNSS side-lobe signals can project out from the satellite at angles up to 120° (Ashman et al., 2018) greatly increasing signal visibility (see Figure 1a). It should be noted that the beam width of the GNSS signal can vary significantly between constellations and transmission bands (i.e. L1, L5) (Miller et al., 2019).
GNSS use in space, based upon this approach, has been commercially available since 2010 when NASA made available its Navigator GPS Receiver (Keesey, 2010). Development of this system began in the mid 1990s with the AMSAT-OSCAR-40 satellite which recorded GPS side-lobe signals which led to the Navigator GPS receiver program in the early 2000 targeted at GEO applications (Lulich et al., 2012) which led to the filing of a patent in 2004 (Winternitz et al., 2009).
The expansion of the use of GNSS into high orbits has subsequently received widespread acceptance. In 2018 the United Nations Office for Outer Space Affairs (UNOOSA) defined the Global Positioning System (GPS) between 3,000 km and 36,000 km above the Earth’s surface (United Nations Office for Outer Space Affairs, 2018) and established baseline signal performance for the region. Terrestrial and LEO users have been pooled into the terrestrial service volume (TSV) which extends to an altitude of 3,000 km and has a separate set of operational requirements (Ashman et al., 2018). These regions are shown in Figure 1b together with an indication of main and secondary lobe transmissions, which can be used in the space service volume (SSV) and extends beyond the TSV to GEO.
Unlike terrestrial applications for which at least four satellite signals have become the expected minimum standard, the minimum signal coverage required for GEO navigation using GNSS is that at least one satellite signal is visible 80 percent of the time and at least four satellite signals are visible for at least 1 percent of the time for the L1 carrier frequency at 1575.42 MHz (Miller et al., 2016). The SSV of the GPS has therefore been defined up to the region of GEO provided at least one satellite is in view so that synchronisation with GPS time is always available (Bauer et al., 2006). This is possible through the use of special weak-signal GPS receivers which possess a 25 dB-Hz tracking threshold and an extended Kalman filter (EKF) which can propagate solutions through signal outages (Ashman et al., 2018). Imperfectly sensed or executed manoeuvres, however, will create perturbations, which can accelerate the degradation of the navigational solution.
Beyond GEO, GPS performance cannot yet be guaranteed, as there is a paucity of relevant operational experience, simulation and research data on the use of existing GNSS infrastructure for navigation at altitudes above 60,000 km (Wang et al., 2015). Four NASA robotic spacecraft (tasked with studying the Earth’s magnetosphere) established a new record in 2019 when they used GPS to navigate in tight formation up to a distance of 186,000 km from the Earth (Baird & Hatfield, 2019). The strength of the GPS signal at an orbital apogee that was almost half-way to the Moon did much to invigorate efforts to adapt GNSS services for lunar activities.
3. Lunar exploration and development
The Moon is expected to be one of the next frontiers in the use of GNSS (EUSPA, 2021). The discovery of natural resources on the lunar surface such as water (Tiwari, 2022) has renewed interest in returning to the Moon (Impresario et al., 2018). Precision navigation will be instrumental in enabling cis-lunar missions (EUSPA, 2021). Numerous other roles for GNSS use in lunar missions have been proposed (Parker, 2021) including:
-
Lunar surface operations including robotic prospecting and human exploration
-
Robotic lunar orbiters, resource and science sentinels
-
Human-tended lunar vicinity vehicles (Gateway)
-
Earth, astrophysics and solar science observations
-
Satellite servicing
-
Lunar exploration infrastructure
The use of GNSS for lunar activities poses a significantly greater challenge than its use in GEO as the signal will be more than 30 times weaker and the dilution of precision (DOP) between 10 and 100 times worse (Parker, 2021) (see Figure 2). DOP is a measure of how the overlapping errors in range estimation from each satellite in the GNSS contributing to the estimate of a user’s position may combine unfavourably due to geometry as for example they become less spread out with increasing distance from the user. Despite these formidable challenges, GNSS signals have the potential to be used for lunar navigation with an errors as low as 50 m (Mangialardo et al., 2021).

The feasibility of using GPS and GALILEO side-lobe signals for navigation of the ‘Chang-E one’ lunar mission has been investigated through simulation and it was found that sufficient GNSS signals were visible to meet the basic requirements for autonomous navigation for the mission (Wang et al., 2015) (see Figure 2). The European Union Agency for the Space Programme (EUSPA) agree that GNSS signals will satisfy the requirements for translunar trajectory navigation, particularly if high-gain antennas and GNSS secondary signal lobes are considered, however they argue such signals will be insufficient for rover guidance or autonomous landings on the Moon (EUSPA, 2021). The European Space Agency believe that GNSS signals could be used for navigation on the Moon, however, although they claim it would require a new type of receiver (ESA, 2020). Despite this claim, they are also investigating how GNSS signals may be complemented by Moon-orbiting satellites (ESA, 2020) (see Figure 2). The truth of the matter will likely be revealed when the joint NASA-Italian Space Agency (ASI) Lunar GNSS Receiver Experiment (LuGRE) (Parker et al., 2022) places a GNSS receiver on the surface of the Moon to assess signal strength. Further confirmation will come in 2025 with the ESA Lunar Pathfinder mission (Baird, 2022).
Whether or not existing GNSS infrastructure is currently capable of supporting lunar navigation on the near side of the Moon, it is clearly unable to support it on the far side. This has raised the prospect of a dedicated lunar GNSS infrastructure, which would simultaneously address the poor geometric DOP issues of using the existing GNSS for lunar activities, as well as rising concerns that NASA’s Deep Space Network for communications and navigation may be approaching its maximum capacity (Abraham et al., 2018). It has been suggested that a lunar GNSS may require around 24 satellites located in a circular polar orbit at an altitude of around 2 lunar radii (Pereira et al., 2022). A major issue with such a proposal arises from third-body perturbations produced by Earth’s gravitational field, which will dominate at orbital altitudes above 1500 km. Orbits below this altitude will only be able to cover less than 20 % of the lunar surface (Pereira et al., 2022) and would therefore require many more satellites to provide full coverage.
Another major technical challenge in the establishment of a lunar GNSS is identifying suitable timing reference systems and frames. The accuracy of positioning performance of any GNSS is contingent upon the accuracy of the reference frame (Laurenti et al., 2022). The reference frame for Earth-based GNSS consists of many elements which must be translated to a lunar environment, for example, a new gravitational potential model must be developed for the capture of elevation data (Gutierrez, 2022). Indeed, the accuracy of the modelling for the lunar gravitational field will be a fundamental contributor to the lunar ephemeris error, which is the difference between the true position of a satellite in the GNSS and that calculated from the GNSS navigation message (Laurenti et al., 2022).
An accepted and accurate knowledge of the central body reference frame and coordinate system are essential prerequisites for both navigation purposes and distributing associated scientific products such as cartographic maps. The development of these systems and associated interoperability standards will require some degree of international consensus, adding diplomatic challenges to the already significant technical ones. The success of these activities, however, are viewed as prerequisites for more distant enterprises such as the exploitation of Mars (Musacchio et al., 2021). Fourteen space agencies are currently planning exploratory missions to the Moon as a prelude to the colonisation of Mars (Pereira & Selva, 2020)
4. The future of space navigation
Navigation without the precision offered by GNSS has always been challenging. A major reason why past NASA missions deep into the solar system have been limited to flybys has been the near impossible task of putting a probe into orbit around distant moons (Letzter, 2018). Earth-based tracking of position lacks the precision to identify a probe’s location with sufficient accuracy to determine the required engine firing. There have been suggestions for extending the GNSS beyond Earth orbit. Early suggestions included ‘a positioning system oriented around the Sun, rather than the Earth’ (Lightsey, 2002) however many dismiss the feasibility of GNSS use in deep space (Keller, 2020). One proposal to extend GNSS beyond the Earth–Moon system that is actively being investigated is that of a GNSS for Mars[1] (Kozar et al., 2016). A constellation of 15 satellites in Martian orbit distributed evenly across three orbital planes is being considered (Wallace, 2017) which will be instrumental to the success of future manned and robotic missions to Mars. The US Department of Defense remain unconvinced as to the utility of GNSS in deep space and are instead investigating other technologies such as inertial navigation based upon quantum sensors, which may also prove useful in GNSS denied environments on Earth (Strout, 2020).
Short of establishing a network of navigation satellite throughout the solar system, the future of space navigation beyond reception range of any GNSS may lie with X-ray pulsar-based navigation and timing (XNAV) based upon a database of known pulsar locations and their characteristic emission frequencies (Ray et al., 2006). Such a system is analogous to GNSS but replaces artificial satellites for a special type of magnetised neutron star known as a millisecond pulsar, which generates high frequency pulses of light across the electromagnetic spectrum with a navigational potential akin to a lighthouse. Most pulsar emissions have unpredictable irregularities in the frequency of their pulses and emit mainly radio frequencies, however some emit in the X-ray region and are sufficiently reliable to serve as accurate clocks. Indeed, pulsars can rival atomic clocks currently used in GNSS in terms of accuracy (Harris, 2022) and each has its own unique characteristic signal (Larson, 2022). The reliability of these signals together with the ability to detect them with an instrument with dimensions of less than one square metre (Sheikh et al., 2006), make them an excellent basis for a ‘cosmic’ navigation system based upon their orientation from the user and avoids the need to establish and manage a constellation of artificial satellites scattered throughout deep space.
Despite the great potential that these alternative systems offer in providing PNT services, currently GNSS is the most developed and reliable technology available which is capable of supporting cis-lunar space activities including Artemis and any subsequent lunar missions. That it offers immediate cost saving benefits to current and future satellite missions in Earth orbit is an additional incentive that will ensure the dominance of GNSS in the provision of PNT space services for the immediate near future.
5. Conclusion
In the immediate and near future, navigation systems based upon existing GNSS infrastructure represent one of the most compelling options for navigation in both cis-lunar space and on the near side of the lunar surface due to their low cost and reliability as they are founded upon existing and proven technology. That supporting infrastructure does not need to be developed nor existing systems augmented before such a system can be utilised also makes it available for immediate use once fully developed. In the longer term, however, such systems are likely to be replaced by XNAV based alternatives, which have the potential to provide accurate navigational capabilities throughout the solar system and into deep space without the need for any external infrastructure.
An original version of this paper was submitted in partial fulfillment of a Master of Space Engineering at University of New South Wales (Canberra).
The distance from Earth to Mars is 54.6 million kilometres.